




OptoFidelity与于韦斯屈莱大学物理学系建立了合作关系。我们的合作涉及HMD测试技术领域的学术研究。我们的合作重点是为VR头戴设备的跟踪性能寻求新的光学测量技术和方法。最终,我们开发了一种用于测试HMD的新技术。如果HMD的跟踪性能不佳,将对最终用户体验产生巨大影响。OptoFidelity多年来一直在进行用户界面测试的研究。随着HMD受到越来越多消费者的青睐,高质量测试技术的需求也将水涨船高.
当今智能设备行业和研究中最热门的主题之一就是虚拟和增强现实(VR/AR)头戴设备的开发。最先进的空间定位实施方案利用多个摄像头和传感器来寻找用户头部在周围空间中的位置和方向。这称为六自由度(6DoF)跟踪。和机器人技术类似,即时定位与地图构建(SLAM)算法还可以通过识别墙壁和其他障碍物使头戴设备更好地适应周围环境。例如,高通公司已经在其新开发的移动处理器中实施了SLAM [1]。
头部跟踪的质量和精度是虚拟现实体验的关键因素。跟踪效果不佳可能会使用户产生恶心不适的感觉,或破坏虚拟现实体验的可信度和沉浸感。设备和内容的开发需要采用一种客观的评估跟踪行为的方法。高质量的跟踪可通过观察例如用户运动与更新的显示内容、抖动(内容的随机晃动)或漂移之间的延迟(运动的光子延迟)来定量。
测试跟踪性能有多种可行方法。例如,访问头戴设备合适的API可以记录和调查头戴设备的跟踪系统、图形堆栈或其他某些组件的数据。此外,还可利用图形内容已更改的应用程序的光子延迟测量来进行测试。通过外部传感器(例如颜色传感器或摄像头)观察显示器的相应变化,并测量两个事件之间的延迟。
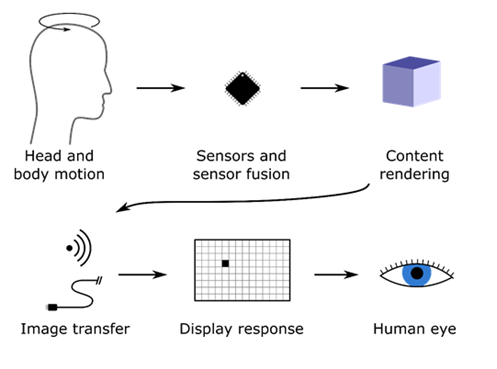
图1:“运动的光子路径”的示意图,即VR/AR系统的组成部分,涉及将用户的运动转换为内容并显示更新,从而带来虚拟现实的体验。
但是,总而言之,将运动转换为显示更新对于用户而言很重要。上面讨论的测量方法不能捕获这种端到端的行为。OptoFidelity开发了一种全新的VR/AR测试仪,用于端到端的测量。包括一个启动头戴设备(戴在头形夹具上)的机器人和一个摄像头,该摄像头可逐帧捕获显示内容并执行计算机视觉分析。通过比较内容运动和机器人运动配置文件来找到运动的光子延迟。这种测量方法可捕获VR/AR系统的总累积延迟,如图1所示。图2显示了我们第一个用于运动的光子延迟测量的产品,即OptoFidelity VR万用表。VR万用表可利用上述新开发的HMD测试技术。

图2:OptoFidelity VR万用表以一个自由度测量运动的光子延迟。是OptoFidelity HMD测试技术产品组合的一部分。
显示器的工作方式使得捕获VR显示器的图像并不是件容易的事:几乎所有VR显示器的像素持久性都较低,这意味着该显示器每帧仅能显示一小段时间(通常为几毫秒)。因此,图像捕获必须准确同步到显示刷新。为此,OptoFidelity采用的是由图像传感器、微控制器和颜色传感器组成的自定义智能摄像头。颜色传感器指向显示器,并利用用于检测显示器照明的上升沿的微控制器高速采样。然后,微控制器触发图像曝光并读取图像。本公司员工SakariKapanen在硕士论文[2]中描述了这款摄像头的部分开发细节。
VR测量中使用的机器视觉算法也可以在微控制器上实施。对于1DOF运动的光子延迟测量,内容的运动通过光流算法检测。对于更复杂的测量,可将一组可检测对象放置在虚拟世界中并显示在头戴设备上。摄像头将检测到所捕获的2D图像中虚拟对象的位置。根据这些3D-2D点对,可以计算出虚拟摄像头的位姿,从而可以进一步计算出头戴设备的跟踪系统估算出的位姿。论文[2]中对该算法进行了数学分析。一项特别重要的观察结果显示,由于2D图像中的X旋转和Y平移(反之亦然)之间存在不确定性,因此目标点的平面排列对于6DOF位姿的估算效果不能达到最佳。根据研究,我们可以向目标图案在平面外添加点。
总体而言,使用自定义机器视觉摄像头测量设备的显示器的运动情况比较方便。例如,比较一组不同VR头戴设备的运动的光子延迟非常容易,因为不需要对设备进行侵入式访问,操作员只需要更换头戴设备即可。集成颜色传感器还可以逐帧监视帧间隔和持久性。更复杂的3DOF和6DOF测量平台正在开发中,类似的测量方法(包括摄像头)已在此进行了介绍。
完整的学术研究包含在韦斯屈莱大学物理系的发表论文中。如果您有兴趣查阅我们的其他帖子并想了解有关HMD测试技术的更多信息,请在我们的博客中搜索“VR”或访问我们的VR测试解决方案页面。

