当测试头戴式显示器的运动到光子(M2P)延迟时,CPU/GPU负载和网络宽带等因素都会影响测试结果。因此,用户通常会希望在HMD测试过程中使用特定的视觉元素,来更好地对应实际情况。然而,屏幕上的影像是虚拟世界观察者的方向和定位信息的确切来源,因此,添加额外的内容存在根本性的挑战。为了能够从图像中获取这些信息,我们有必要借助某些参考内容。
以OptoFidelity Buddy为例。为了能够测量HMD的时间特征,你需要在HMD中显示一个参考“世界”,从中分析观众的虚拟位置和方向。在Buddy的测试案例中,虚拟世界有数千个圆点标记,以球形布局的方式设立。虚拟摄像头(或观众)位于球体的中心位置。从每一帧可见的标记点中,可以研究相应的视图方向。那么虚拟世界中的姿态可以比作现实世界中的HMD姿态。
在这样的环境中添加所需的内容似乎是一件很容易的事情。但是如果标记点位于2公里外的虚拟世界中,那会怎么样?部分附加物件会定位在与观众相近的地方,从而阻挡了对标记的可见性。
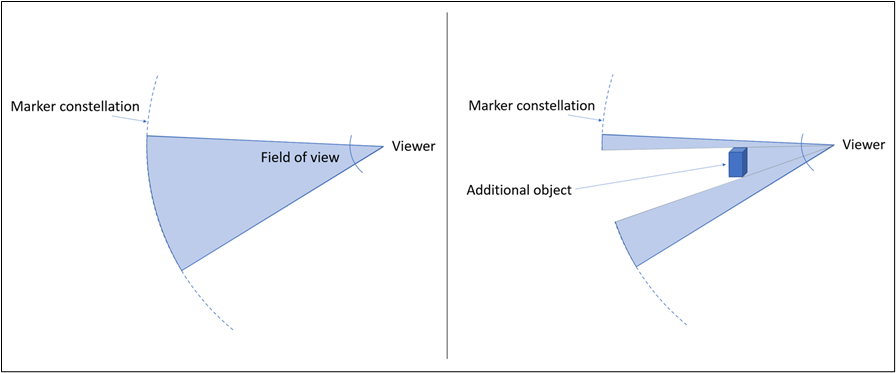
左:用于时间测量的VR内容。 右:附加物件阻碍测量内容的可见性。
如何建立一种通用方法来实现用一种方式去呈现任何附加内容,即在每个渲染帧的中心,您始终可以看到远处的标记点?不仅如此,您始终都能看清标记点,并且有足够的亮度以触发帧捕获。
这是OptoFidelity高级软件设计工程师Jouni Mäkitalo所面临的挑战。Jouni提出了一个巧妙的解决方案。首先,先渲染所需要的附加内容。紧接着,从观众的视角为每一帧渲染一个白板,使其位置与方向完全一致。现在,巧妙的地方在于关闭深度测试的白板,因此,无论白板跟观众之间是否有阻碍物,白板都会呈现在之前渲染的画面上。
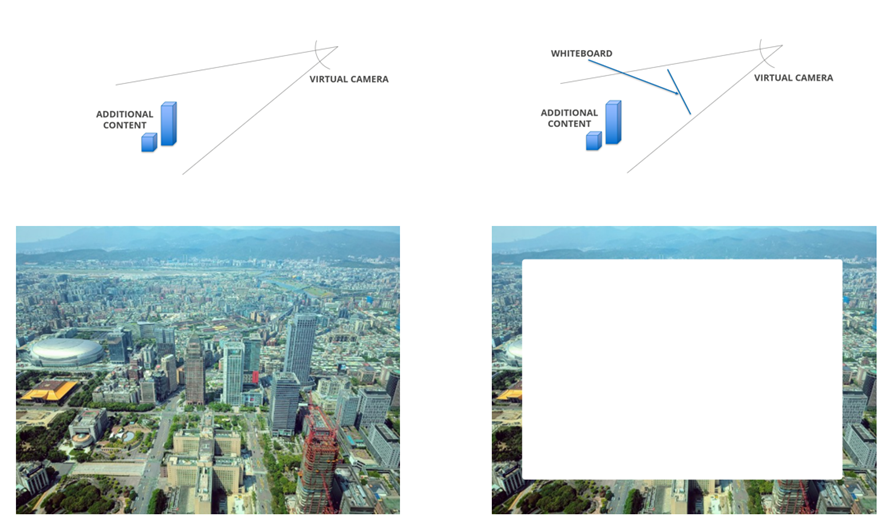
左:所需的附加内容。右:在关闭深度测试时渲染的白板。
在最后阶段,标记内容以其原始形式呈现,即半径为 2 公里的球形合集。同样,深度测试被关闭,使标记在白板上清晰可见,而在移动HMD时仍然表现得像2公里远。
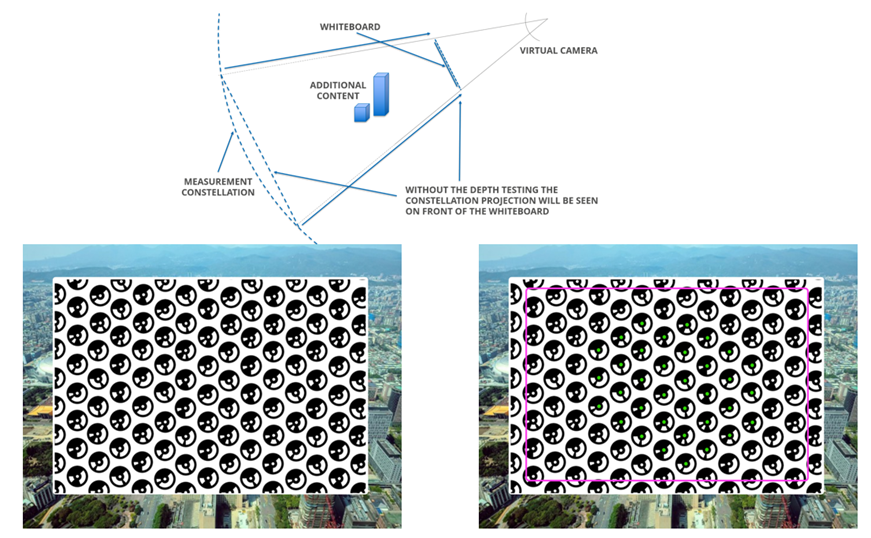
左:深度测试关闭时,测量标记点渲染到原始位置。右:标记点中心的绿点表示标记已被分析软件识别。
运用这种方法,现在可以在更接近HMD实际使用的条件下去测试和测量MTP延迟。虽然简单的CPU低负载构型内容在HMD设备开发的某些步骤中能够起到一定作用,但像无线网络供应商这样的用户则需要更多终端用户类型的内容。
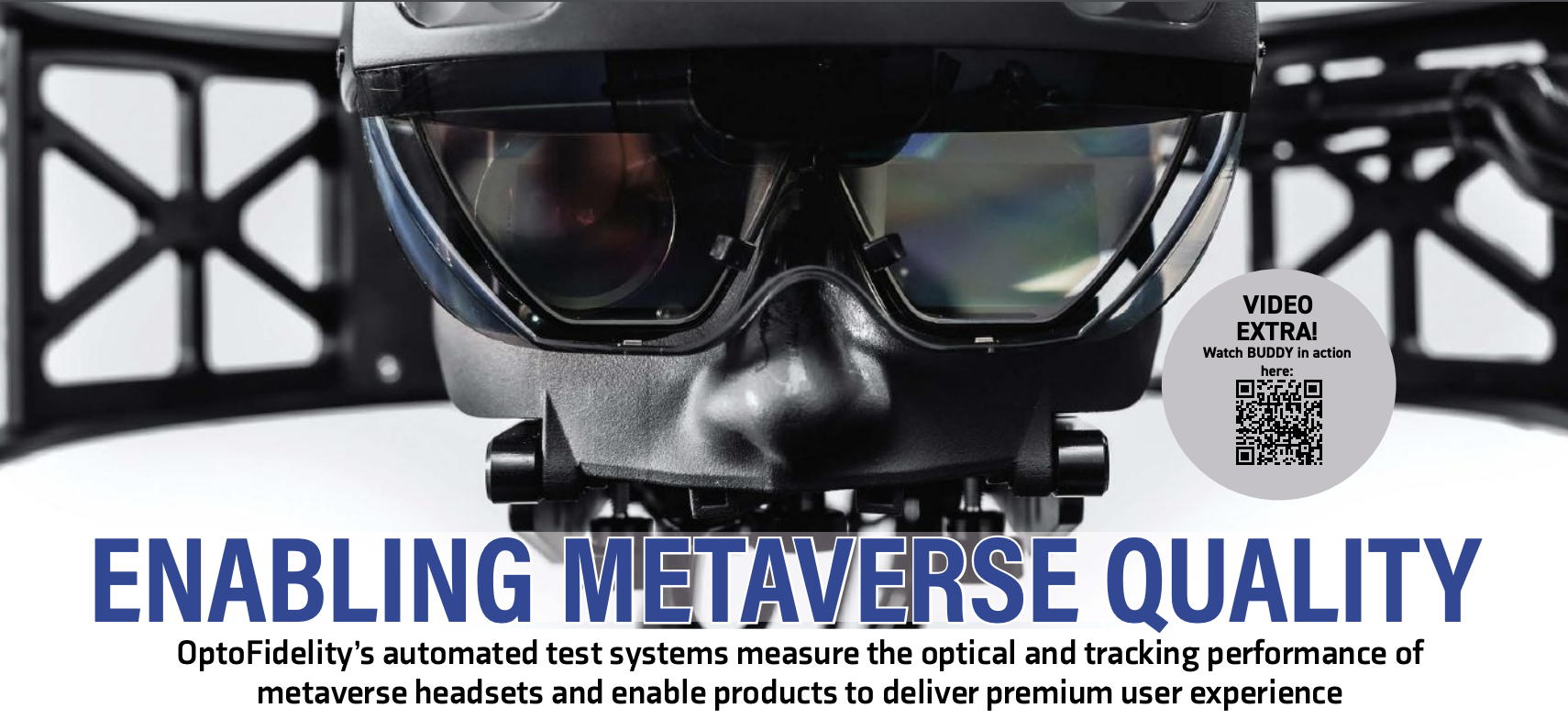
拥有超过18年的技术经验,OptoFidelity是设计和制造用于测量AR/VR系统的光学和追踪性能自动化测试系统的技术指引者。
请联系我们来讨论并找到符合您需求的解决方案。
打算出席SPIE AR|VR|MR 2023吗?
到102号展位与我们的专家相会,详谈 OptoFidelity的测试能力。
展会无法出席?OptoFidelity同样会参展AWE USA 2023以及Display Week 2023。我们期望与您相见!